長野センターのSDGsへの取り組み
kikka.7243@neuron-lab.net
株式会社ニューロンネットワーク
当社は持続可能な環境保全活動の一環として、諏訪湖における水中ドローン(ROV)を活用した湖底ごみ回収プロジェクトを開始いたしました。
従来の水上面ごみ回収とは異なる、湖底に特化した独自のアプローチにより、これまで手つかずだった水中環境の改善に挑戦します。


サステナブル(Sustainable)とは「持続可能な」という意味を持つ言葉で、地球環境の安全と経済成長を両立させ、安定的な社会づくりを目指す理念です。
その実現のための具体的目標としてSDGs(Sustainable Development Goals)があります。SDGsは2015年9月の国連サミットで採択された「持続可能な開発のための2030アジェンダ」に記載された国際目標であり、17のゴールと169のターゲットで構成されています。
当プロジェクトは、特にSDGs目標14「海の豊かさを守ろう」に関連しています。諏訪湖は海ではありませんが、最終的に海に流入する水源であることから、同種の環境保全活動として位置づけています。
水中生態系の保全と水質改善を通じて、持続可能な水環境の実現に貢献することを目指しています。
諏訪湖の水質は近年改善傾向にあるものの、令和3年の測定結果ではCOD(化学的酸素要求量)の環境基準である3.0mg/Lを達成できていない状況が続いています。
水質改善には様々な要因がありますが、湖底に堆積したごみもその一因と考えられます。
ごみの分布については、その比重から主に水上面と湖底付近に集中していると推測されます。
水上面のごみに関しては、既に各企業やボランティアなどによるボートを用いた回収活動が行われています。
一方で、湖底付近のごみについては、アクセスの難しさから十分な対策が講じられていない現状があります。
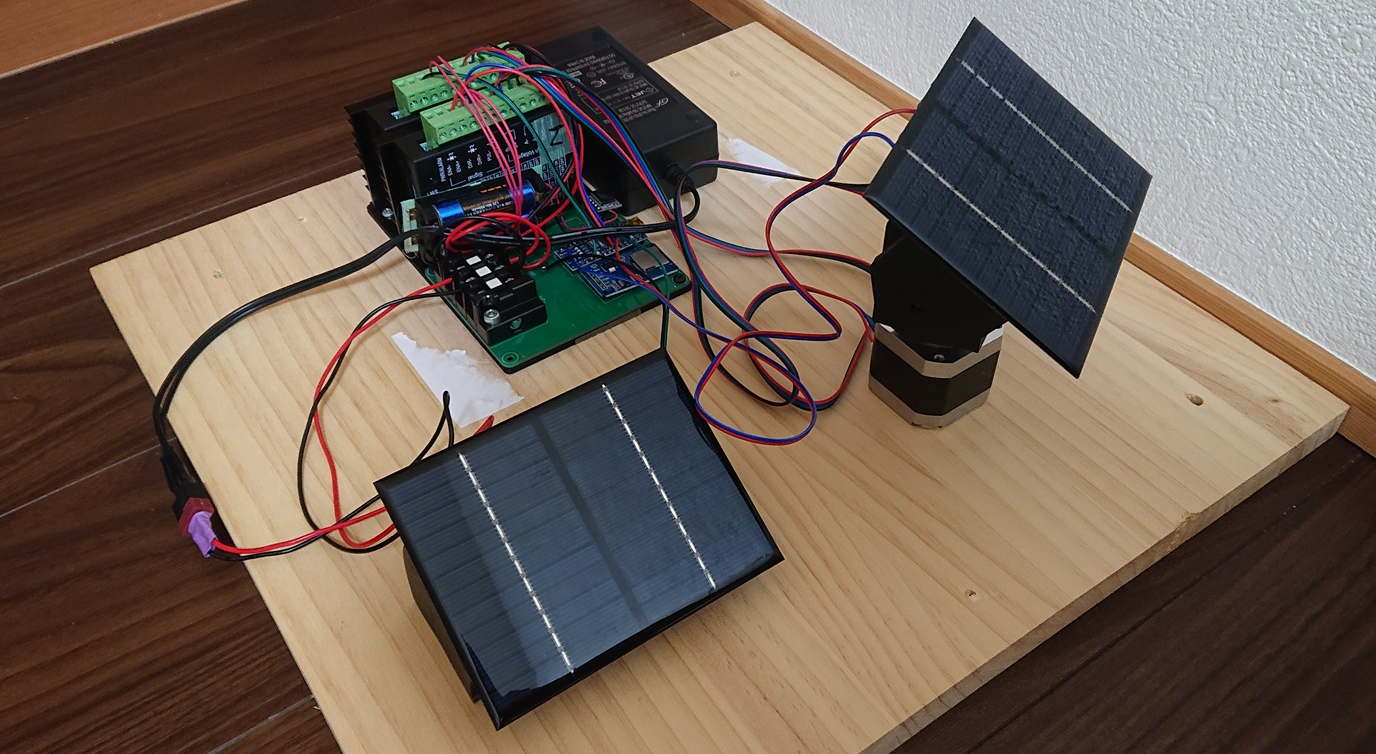
当社では、現状実施されていない湖底付近のごみをターゲットとし、水中ドローン(ROV: Remotely Operated Vehicle)を活用した回収システムを開発しました。水中ドローンは、操作者が水中に入ることなく遠隔操作で湖底を探査・作業できる点が大きな利点です。
水中ドローンを活用することで、以下のようなメリットがあります。
これらの特性を活かし、従来のアプローチでは難しかった湖底環境の改善に取り組みます。
ごみの分布は、ごみの比重から水上面と湖底付近に集中していると考えられます。
水上面のごみに関しては、既に各企業やボランティアなどによりボートを用い回収が行われていることから、弊社は現状実施されていない湖底付近のごみをターゲットとし、これを水中ドローンにより回収します。
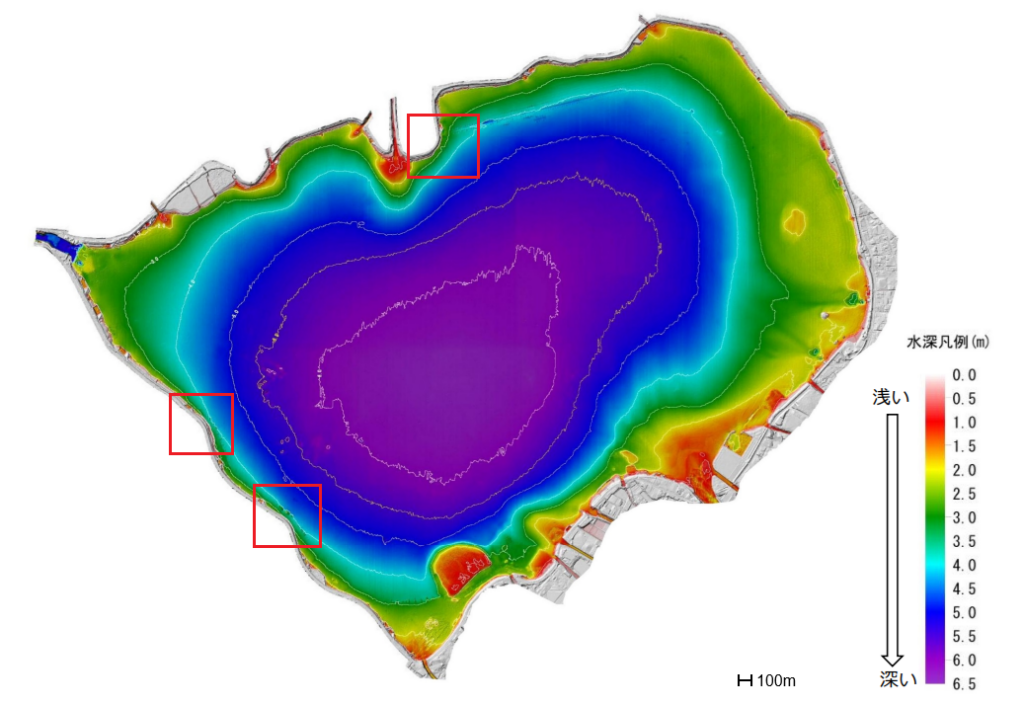
効果的なごみ回収を行うために、事前調査を実施しました。まず、ボートからごみを回収できない水深を2m以上と推定し、どの地点でごみ回収を行うべきか検討を行いました。
調査の結果、諏訪湖では基本的に湖岸から200m程度の場所まで進む必要があることが判明しました。
しかし、現在使用している水中ドローンのテザーケーブルが最大100mであることから、湖岸からのアクセスでは水深2mの地点に到達できないという技術的制約があります。
また、冬季の諏訪湖の水温は0~5度程度であり、ボートからの作業は安全面での懸念があります。(下図赤線が湖岸100m地点)

これらの制約を考慮し、冬季調査に適した場所として、「湖岸から100m以内かつ水深2m以上の地点」を複数箇所特定しました。
このアプローチにより、安全性と効率性を両立させた調査が可能になります。
まずは水中ドローンに必要な性能を見極めるため、湖岸から水中カメラを含めた実験装置を投入して湖底の状態を観察しました。
観察結果の詳細につきましては、次回の記事にて改めてご報告いたします。最後までお読みいただき、ありがとうございました。
ぜひ一緒にNeuronNetworkで
自己実現しませんか?
NeuronNetworkは皆さん一人一人に合った
働き方・成長の仕方を実現できます。