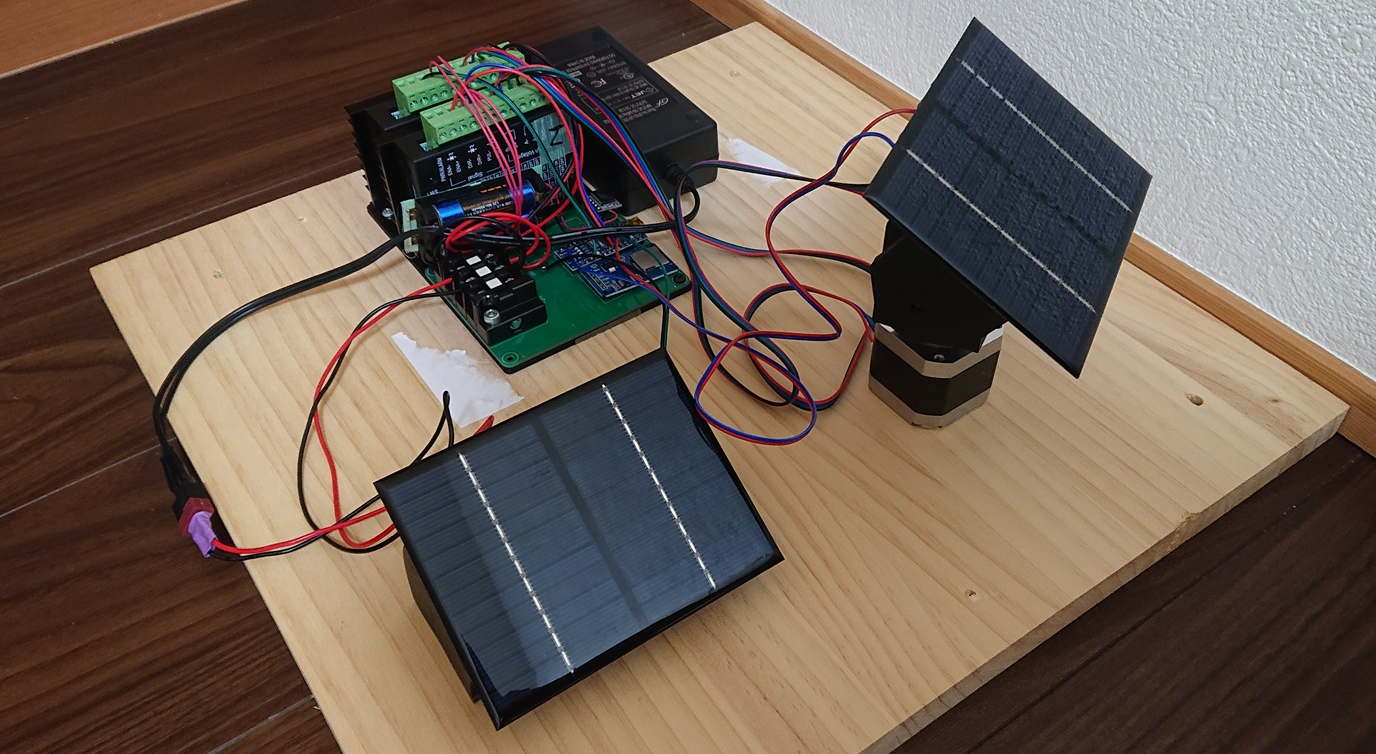
太陽光パネルの発電量比較:固定式と追尾式ではどれだけ差が出るのか?
kikka.7243@neuron-lab.net
株式会社ニューロンネットワーク

諏訪湖における水中ドローン(ROV)を活用した湖底ごみ回収プロジェクト。前回はプラスチックごみの分布調査と、湖底調査箇所の選定を行いました。今回は、前回の調査を基に実際に諏訪湖で実施した調査結果をご報告します。
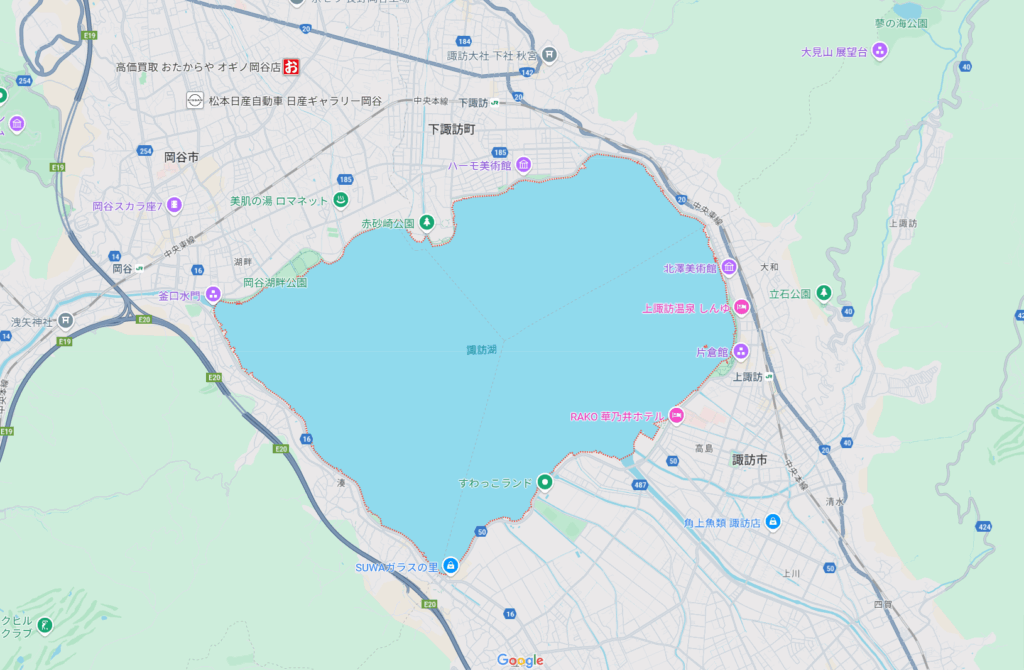
岡谷湖畔公園周辺にて、以下の項目を確認しました:
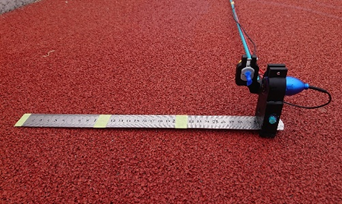
水深約1.5mの湖底に実験装置を設置して測定を行いました。
2月は季節的に水が澄んでいる時期であったため、初期状態では約30cm程度の視界が確保できました。
使用機器仕様:
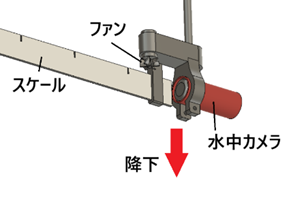
モーターを稼働させたところ、湖底の堆積物や藻類が剥離し、水中の懸濁物質が増加して視界が急激に悪化しました
モーター稼働後の視界距離は約20cmまで低下しました。
この結果から、水中ドローンによるごみ回収を実施する場合、以下の運用方針が必要であることが判明しました:


第1回調査では湖底にごみが確認できなかったため、より浅い水域での回収を試みました。
回収装置では藻類が取れるのみで、ごみの回収はできませんでした。一方、湖岸を目視すると明らかにごみの存在が確認できます。


観察の結果、ごみは石や岩の隙間に入り込んでおり、物理的な回収が困難な状態と推測されました。
岩の隙間に固定されたごみは、魚類等による誤飲のリスクが相対的に低いと考えられます。そのため、堆積物を巻き上げてまで回収する必要性は低いと判断し、回収対象を湖底から湖面に変更することにしました。



Activity Base Cogue様のご協力により、カヌーを使用して湖面のごみ調査を実施しました。
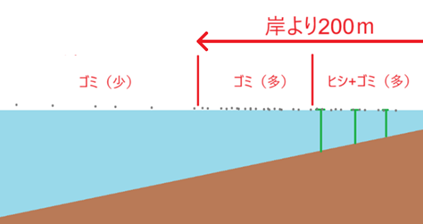
岸から100m地点(A地点)と200m地点(B地点)でごみの種類と量を確認しました。


岸に近いこと、また岸辺に繁茂するヒシ(水生植物)の葉にごみが捕捉されやすいことから、相当量のごみが確認されました。


A地点からわずか100m移動しただけで、ごみの発見が著しく困難になりました。

諏訪湖全体から見れば岸近くの狭い範囲の調査ですが、この短距離でもごみ分布に明確な差異が見られました。風向などの気象条件によって分布は変動すると考えられますが、概ね岸から200m以内の範囲でごみ回収を行えば効率的と判断されます。
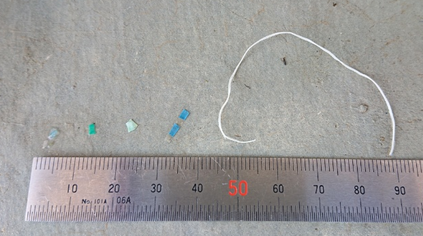
今回回収したごみは、すべてプラスチック製品でした。
そのうち4種類は、マイクロプラスチック(5mm以下のプラスチック片)に該当するサイズでした。
用語解説
マイクロプラスチック:5mm以下のプラスチック片。生物の誤飲や食物連鎖を通じた生態系への影響が懸念されています。
マイクロビーズ:0.1mm以下のプラスチック粒子。化粧品などに使用されていたものが環境中に流出。

当初は湖底のごみ回収を計画していましたが、今回の調査結果を踏まえ、まずは回収効率が高く、技術的難易度の低い湖面のごみ回収から着手することにしました。
次回からは、実際に水中ドローン等を使用したごみ回収の実施フェーズに移行します。
5〜10月はヒシが湖岸を覆う箇所が多く、ドローンの機体やテザーケーブルがこれらの水生植物に絡まるリスクがあります。安全かつ効率的な運用のため、障害物回避のノウハウを蓄積していく必要があります。
今回の調査により、以下の知見が得られました:
引き続きプロジェクトの進捗がありましたら、こちらでご報告させていただきます。