長野センターのSDGsへの取り組み
kikka.7243@neuron-lab.net
株式会社ニューロンネットワーク

近年、全国的に熊の出没が相次ぎ、人家や畑への被害が社会問題となっています。
現在の熊対策としては、教員や地域の方による通学路の見回りなどが一般的ですが、人の負担が大きく、遭遇のリスクもゼロではありません。より安全性を高めるためには、人と熊との遭遇率そのものを下げる仕組みが必要です。
そこで私たちは、既存の対策に加え、ドローンと画像認識AIを活用した新しい「害獣偵察システム」の実験を開始しました。本記事では、その開発目標と実験の様子をご紹介します。
定期的にドローンを飛行させ、指定領域に熊などの害獣がいないか監視します。
人の介入を極限まで減らした「自動化された熊対策」を目指し、具体的には以下の3点を実現します。
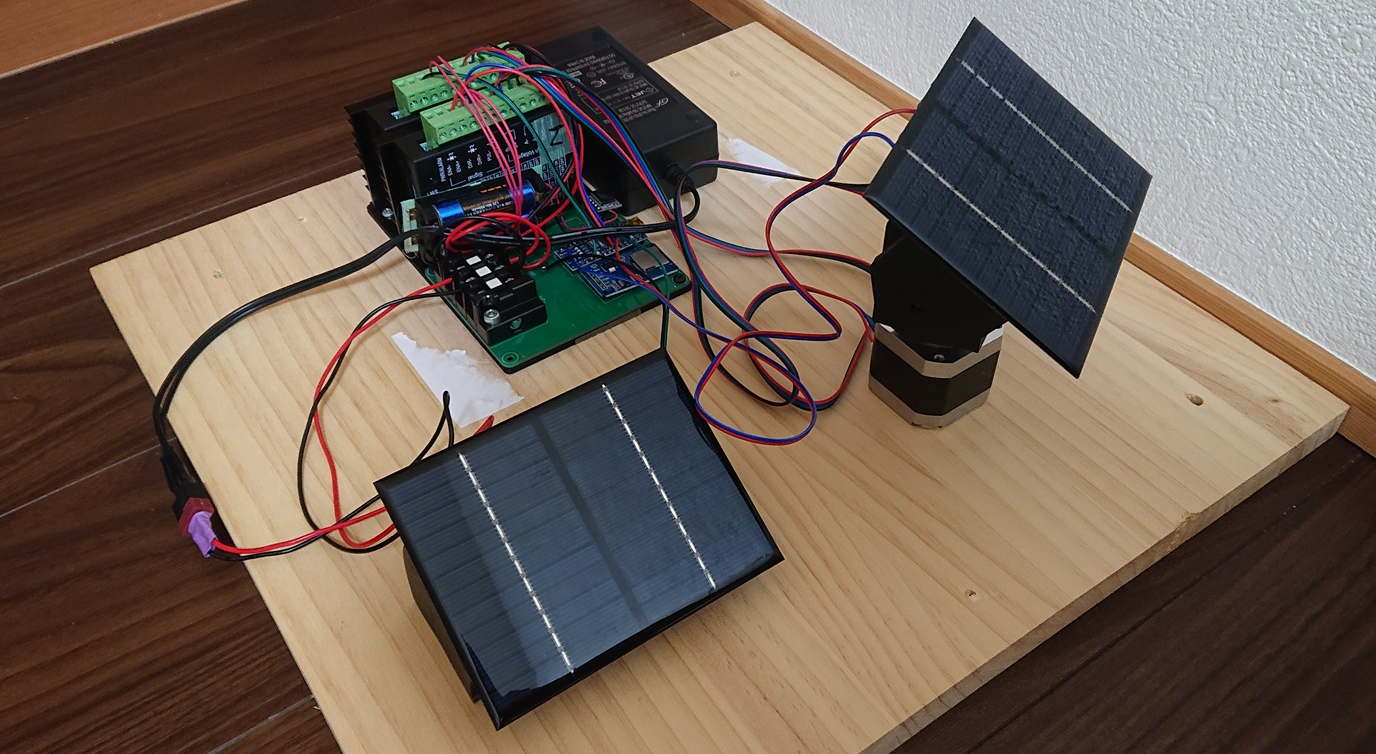
A)自動発着、自動充電
B)GPSを利用した指定航路の飛行
C)害獣判定を画像処理で行い、害獣発見時のみアラームを出す
AI画像処理による熊の検知システムの構築:
機材は購入可能なもので揃うため、開発の主眼は「映像から熊をAIで判定し、発見時のみアラームを出す」機能の実装になります。
基本的には市販品を利用し、低労力で実現します。
ドローンの大手、DJIにてそれぞれに対応した機器や機能の取り扱いがあります。

ABについては購入して済むので、主な取り組みは「害獣判定を画像処理で行い、害獣発見時のみアラームを出す」という機能の実装になります。
これについては、まず
を確認しました。
画像処理するために、まずはドローンの映像をPCへ送ります。
DJIのドローンにはスマホと組み合わせて映像を確認する物があり、今回使用しているものはこれに該当するDJI Mini3です。
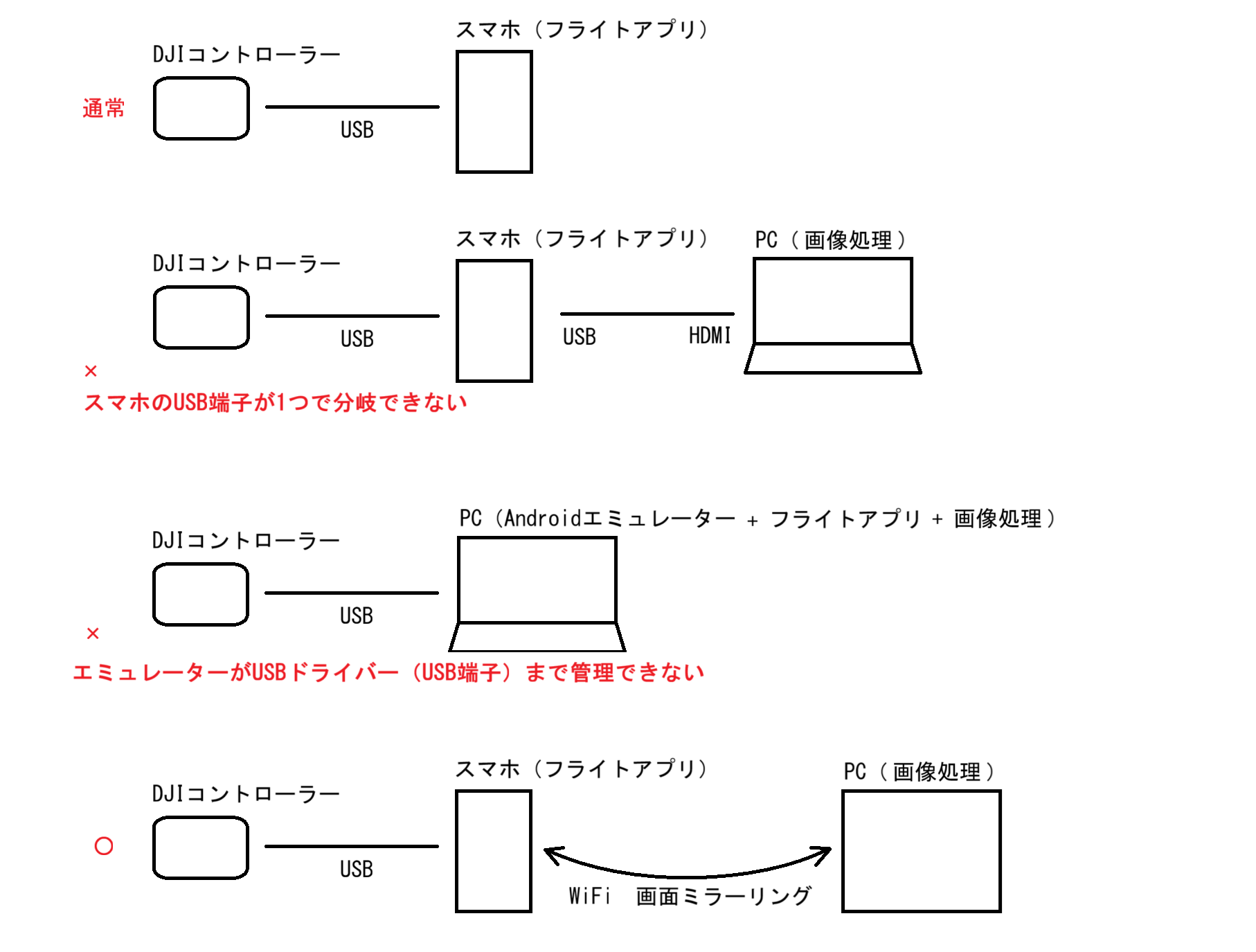
通信のやり取りは下記のようになっています。
ドローン ―(OcuSync)→ 専用コントローラー ―(USB)→ スマホ
複数の手段を試しましたが、最終的に スマホ⇔PC で画面を共有するリラーリングソフトで実現できました。

試した方法は下記です。

まず害獣の映った動画が手元になかったので、商用利用可能な動画素材サイト(https://video-ac.com/)よりダウンロード。
ダウンロードした動画に対して、YOLOv8を使用して動物が映っているか、何の動物が映っているかを処理してみました。
実行環境はGoogle Colabです。
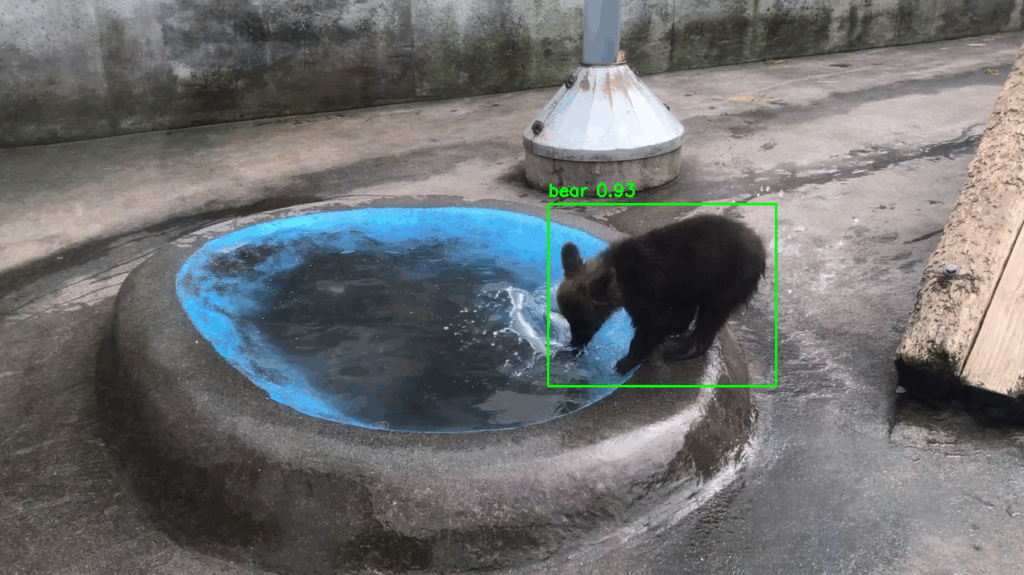

一旦動物を検出できました。
ここでわかった事としては、
○何が映っているかよくわからない状態でも動物として識別できている
△映っている動物のサイズによって、動物の種類が誤判定されてしまう
△ドローンでは上空からの撮影になり、更に動物らしからぬシルエットで映ってしまう
このあたりは実際にドローンで動物を捉えてみないとわかりませんが、下記の理由から使用に耐える可能性があります。
・人の住居地に動物はほぼいない(いても犬猫)
・車や人を動物と誤認識さえしなければ、許容可能な頻度のアラームになると思われる
Google ColabではPCローカルデータへのアクセスが出来なかったため、実行環境をAnacondaへ変更しました。
変更後、PC画面の一部をYOLO Detectionへキャプチャーして、そこへ画像処理の内容を表示しました。
かなり煩雑になってしまいましたが、下記のような経路でドローン映像を処理出来るようになりました。

画像取得までの経路がかなり煩雑になっているので、省略できるとことは省略していきたいと思います。
また、以降は実際にドローンを飛ばし、建物や車、自転車などを誤判定しないか確認していきます。
また進展があれば、追加の記事を掲載させていただきます。